{kind=link}
Software-defined vehicles demand a virtualization-first approach to enable global collaboration, earlier testing, and faster innovation. By Rolf Schaefer
The automotive industry is in the middle of one of the most profound transformations in its history. Vehicles are no longer defined primarily by mechanical excellence, but by software.

The rise of software-defined vehicles (SDVs) has fundamentally reshaped how cars are designed, developed, tested, and maintained. At the heart of this shift lies virtualization – an enabling technology that allows automotive software teams to cope with unprecedented complexity, global collaboration, and the demand for faster, higher-quality innovation.
The new reality of software-defined vehicles
Modern SDV architectures rely heavily on virtualized Electronic Control Units (ECUs). Where traditional vehicles used dozens of tightly coupled, hardware-specific ECUs, today’s platforms consolidate functionality into fewer, more powerful computing units running flexible software stacks. This architectural change dramatically increases system complexity, integration effort, and testing requirements.
As a result, automotive software teams are growing rapidly and are often distributed across continents. Development is no longer confined to a single location or synchronized with physical prototype availability. Instead, teams must collaborate globally, work in parallel, and iterate continuously – conditions that traditional hardware-centric development models can no longer support efficiently.
Shifting left: Software first, quality early
One of the most important consequences of SDV development is the shift from a “hardware-first” to a “software-first” mindset. In the past, software development was often gated by hardware availability. Quality assurance activities typically took place late in the project, when sufficient physical ECUs were finally available in volume.
Today, this approach is no longer viable. Software development lifecycles are shifting left, meaning that integration, testing, and validation must happen much earlier in the project. Detecting issues at an early stage dramatically reduces the cost of fixing them and significantly improves end-product quality.
However, this early validation is only possible if software teams can work independently of physical hardware constraints.
Virtualization as the key enabler
This is where virtualization becomes essential. Once a virtualized ECU or system is developed, it can be duplicated, scaled, and reused almost effortlessly. Virtual environments allow multiple developers, testers, and integrators to work in parallel without competing for limited hardware resources.
Cloud technology amplifies these benefits. Virtualized systems can be deployed globally and accessed from anywhere with an internet connection. With the increasing availability of ARM-based servers and hardware-agnostic standards such as VirtIO, even traditionally embedded automotive workloads are moving closer to cloud-native paradigms.
Compared to the cost of producing, shipping, and maintaining physical hardware, cloud hosting offers remarkable economic advantages – especially in early development phases.

A fully virtualized digital analog remote tuner
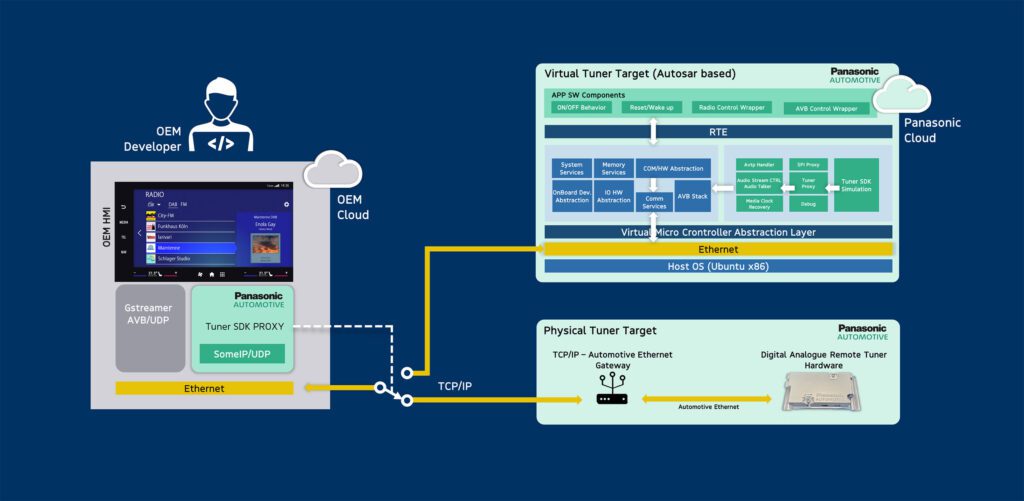
A practical example of this approach is Panasonic Automotive Systems Europe’s fully virtualized Digital Analog Remote Tuner. The system runs in the Amazon cloud and can be accessed worldwide through a standard web browser, while still offering the option to run on a local server if required.
The host operating system is Ubuntu x86. On top of this, a simulation of the TunerSDK stack runs connected to a level 3 virtualized AUTOSAR environment, enabling early software integration without physical tuner hardware.
For the graphical user interface, Android Automotive Cuttlefish is used to virtualize the TunerSDK GUI. This GUI communicates with the tuner software stack via a proxy mechanism, ensuring clean separation between presentation and functional layers.
All communication between the individual virtual instances is based on standard TCP/IP protocols, making the system modular, scalable, and well aligned with modern IT infrastructure.
Simulation: Powerful, but not always enough
To support early development and testing, a simulation environment provides audio and metadata via the TunerSDK to the In-Vehicle Infotainment (IVI) system. This allows developers to validate user interfaces, signal flows, and system behavior long before real radio signals are involved.
However, simulations are only as good as the models behind them. Radio technology is particularly challenging because broadcasting standards differ across countries and are often interpreted differently by service providers. Subtle regional differences may not be fully captured by a generic simulation.
For this reason, stepping back from full virtualization and reintroducing real hardware into the development loop can be essential.
Bringing real hardware into the cloud
Fortunately, virtualization does not exclude physical hardware. Real remote tuner hardware can also be deployed in the cloud – or at least connected to it – making it accessible to distributed teams worldwide. This hybrid approach combines the flexibility of virtual environments with the authenticity of real-world signals.
Access to real hardware located in different countries is a major advantage when developing robust radio software. It allows teams to validate behavior against real broadcasts, regional standards, and live network conditions, significantly reducing the risk of late-stage integration surprises.
Unified interfaces through the TunerSDK proxy
A key element in this architecture is the TunerSDK proxy. By implementing this proxy, the same standardized TunerSDK interface can be exposed regardless of whether the backend is a fully virtualized tuner or real hardware. Communication is provided via SOME/IP or UDP, ensuring compatibility with automotive middleware standards.
For IVI developers, this abstraction is crucial. The IVI system can connect to a virtual tuner during early development and seamlessly switch to real hardware later – without changing the application interface. Detailed API documentation supports a quick development start and reduces onboarding effort for new teams.
Demonstration: Remote access to real remote tuner hardware
To demonstrate this concept, Panasonic Automotive Systems Europe operates a remote tuner hardware setup in one of its offices. The system is connected to the internet and can be accessed globally. At the center of the setup is the remote tuner hardware itself, connected to a house antenna for receiving live radio signals. Alternatively, it can be linked to a generator network that provides test signals recorded during worldwide test drives.
For software updates and advanced analysis, the hardware is connected to a debugger. This enables remote on-chip debugging, real-time performance measurements, and application-specific insights – without requiring engineers to be physically present.
Connectivity is achieved via Automotive Ethernet, which is converted to standard Ethernet using a media converter. This allows the system to be accessed from a regular PC using standard network drivers, bridging the gap between automotive and IT environments.
Conclusion: The future is virtual – and real
Virtualization is no longer optional in automotive software development – it is mandatory. As SDVs continue to grow in complexity, only virtualized, cloud-enabled approaches can provide the scalability, flexibility, and speed required. At the same time, smart integration of real hardware ensures authenticity and robustness where simulations reach their limits.
By combining virtual ECUs, cloud deployment, standardized interfaces, and selective hardware access, automotive companies can achieve the best of both worlds: faster development cycles, lower costs, and higher software quality – ultimately delivering better vehicles to customers worldwide.
About the author: Rolf Schaefer is General Manager / Division Head – Automotive Software Development at Panasonic Automotive Systems Europe.
Sponsored Content: This article was produced in collaboration with Panasonic Automotive Systems Europe.